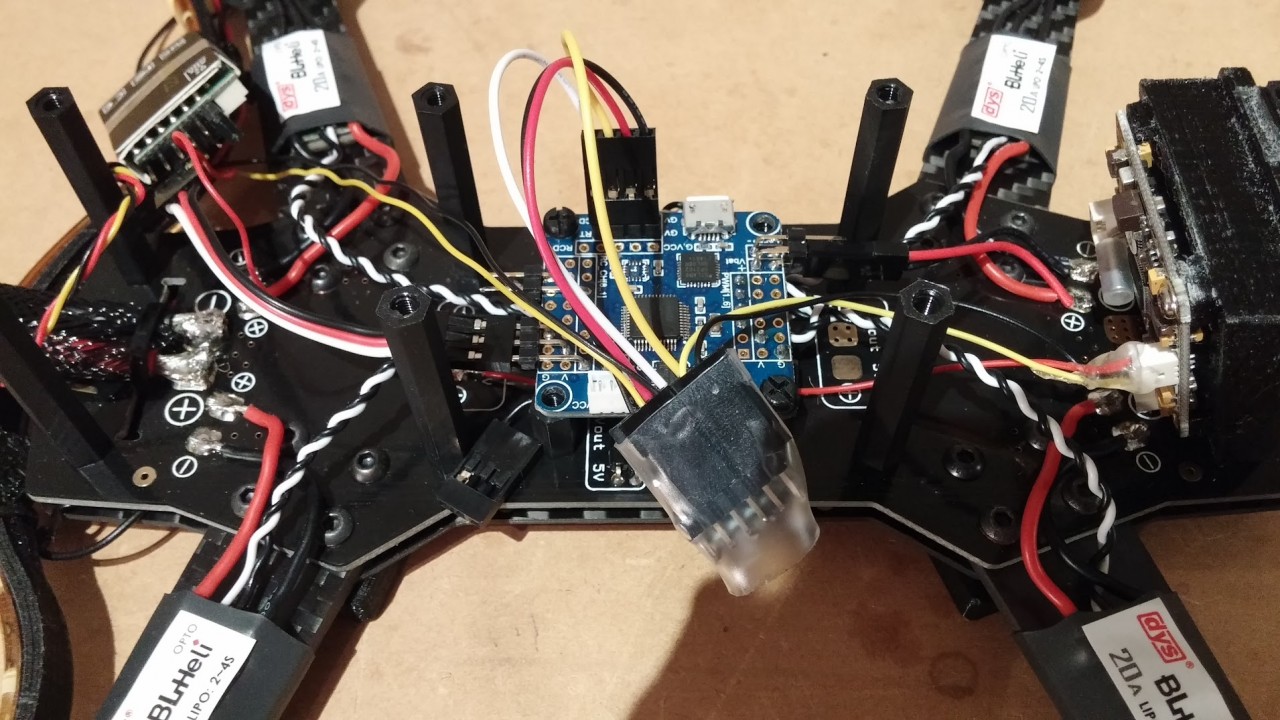
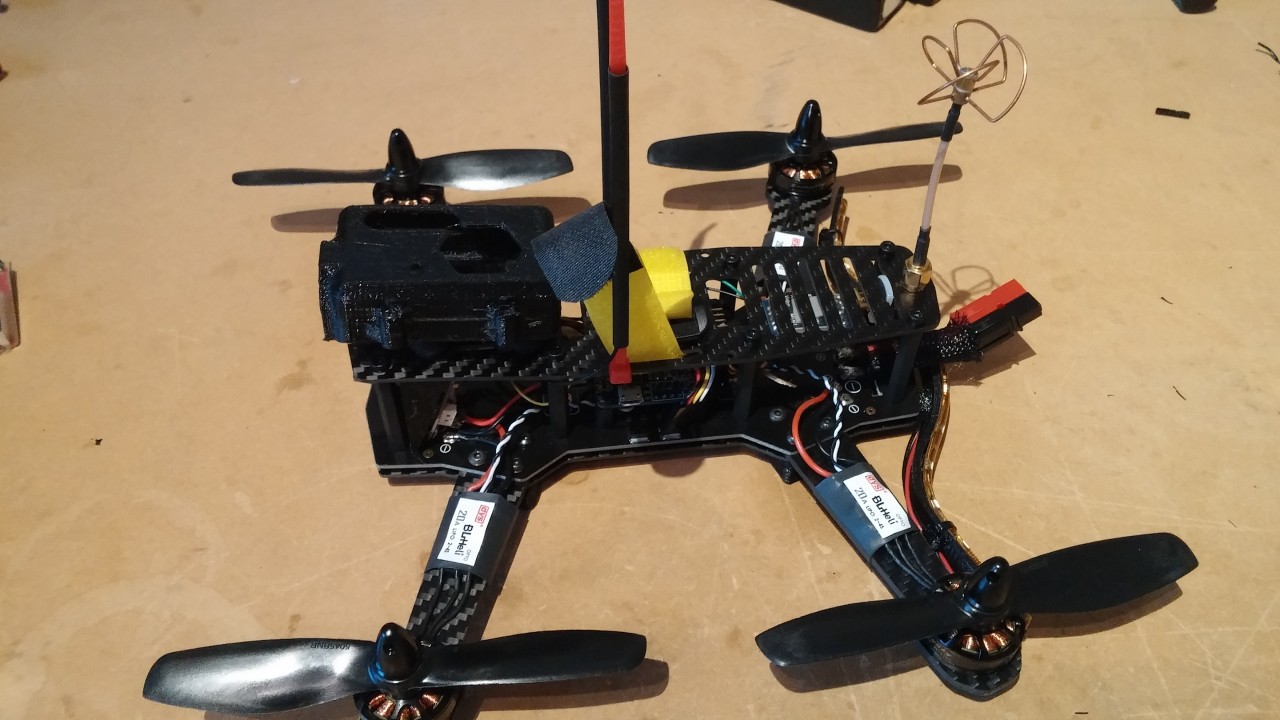
ZMR250 Mini H with Diatone PDB & Micro MinimOSD Build & CLeanflight 1.10 Setup

This is my 2nd ZMR250 build, with this one I decided to try the Diatone ZMR250 Power Distribution Board Ver1 (Ver 2.1 has issues) so I can use both 3s and 4s Lipo’s and DYS SN20a Opto Esc using the PDB to power the flight controller as well as handling the voltage requirement for my FPV System. The BL20’s come flashed with BLHeli so I can run one shot with active braking which should improve the performance of this quad.
The ZMR250 frame is one of the best low cost frames on the market and has more accessories made for it than any other frame out there so you will have almost infinite options to customize it the way you want.
Quad Build Specs:
Quad Frame: RCX H250CF-3K FPV Quadcopter (3K Carbon Fiber / Barebone Frame) or Complete Kit
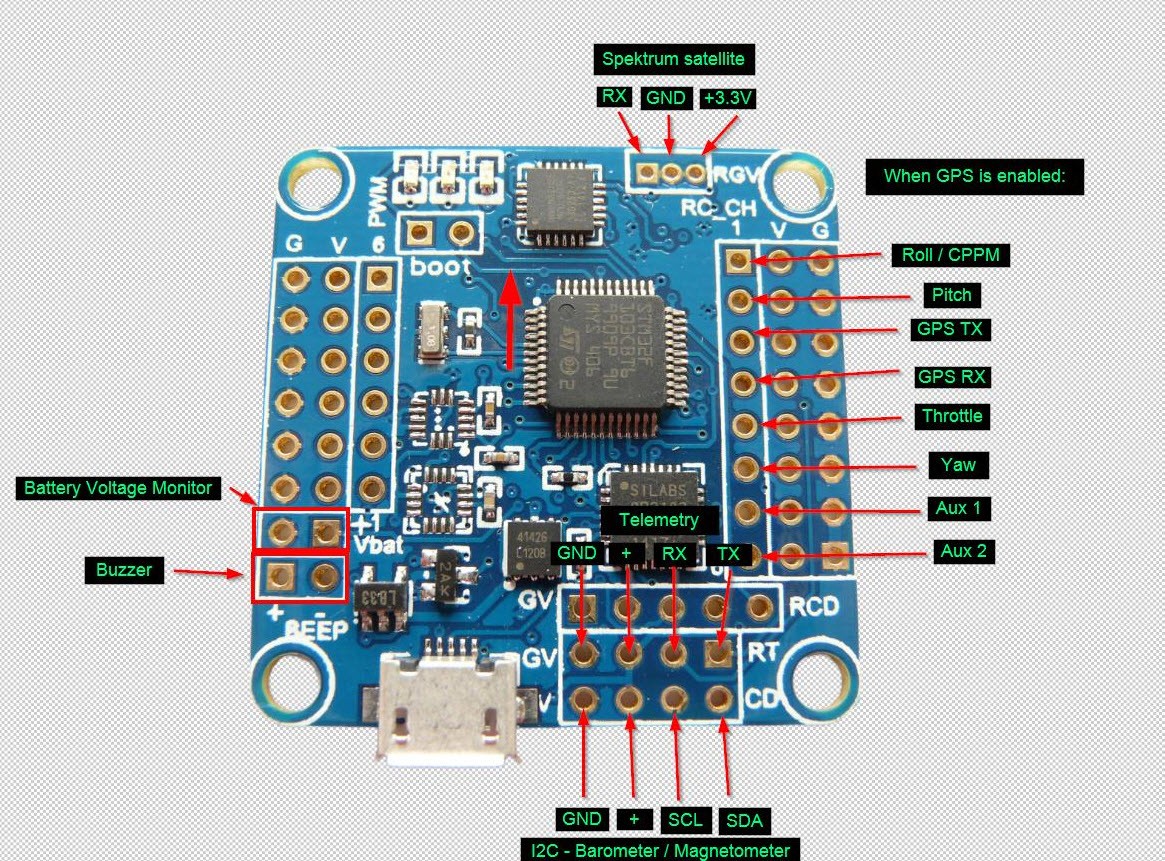
Flight Controller: Flip32 +
Motors: Sunnysky X2204 2300kv
ESC’s: DYS SN20A Mini 20A BLHeli ESC OPTO
PDB: Diatone ZMR250 PCB Board Ver 1
OSD: Micro MinimOSD
Frame skids. Thingiverse link
Led Bumper : Thingiverse Link
Props: Gemfan 5045 Bullnose
Batteries: Turnigy Nano-Tech 1500mah 35C-70C
Controller Set up:
Flight Receiver: FrSky D4R-II
Flight Controller: Frsky Taranis
TX Module: Built in
FPV Set up:
FPV Camera: 600TVL Sony PZ0420 SUPER HAD CCD Color Board Camera w 2.1mm Lens
Video Recording: Mobius action camera.
Video TX: Boscam TS5823 200mw 5.8ghz 32 channels
Video RX: Skyzone FPV Goggles 5.8GHz Dual Diversity 32CH Receiver With Head-Tracker
Antennas: Circular Polarized Antennas
Maiden Flight
Will post video once the weather is good enough to maiden. 😉
Kit Parts








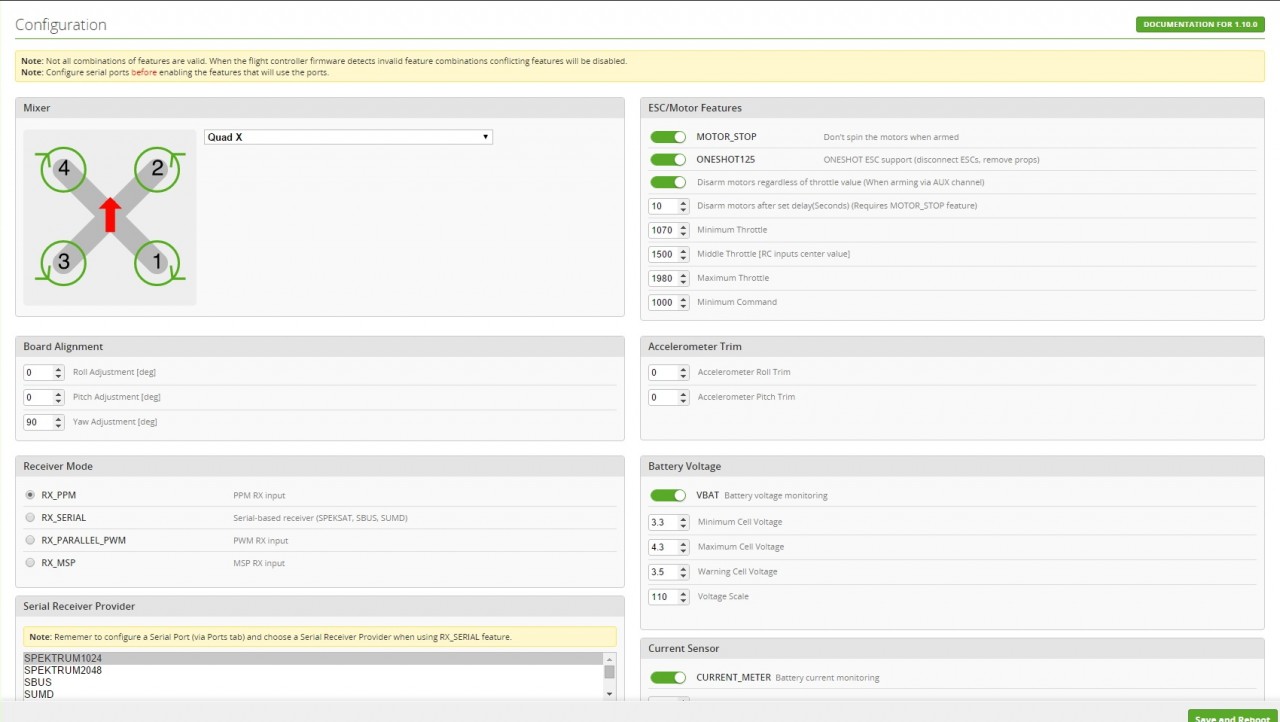
My CLEANFLIGHT Setup 1.10.0 + PID Controller = 1

Some of my Initial setup commands and settings.
feature vbat (only if you us a buzzer for voltage alarm)
feature motor_stop (I don’t like motor spinning after arming, so I enable it)
set looptime = 2500 (~400Hz)
set feature ppm (only if you use ppm receiver, 1 servo lead)
set align_board_yaw = 90 (only if board is rotated to the right for easier USB cable reach on mini quads)
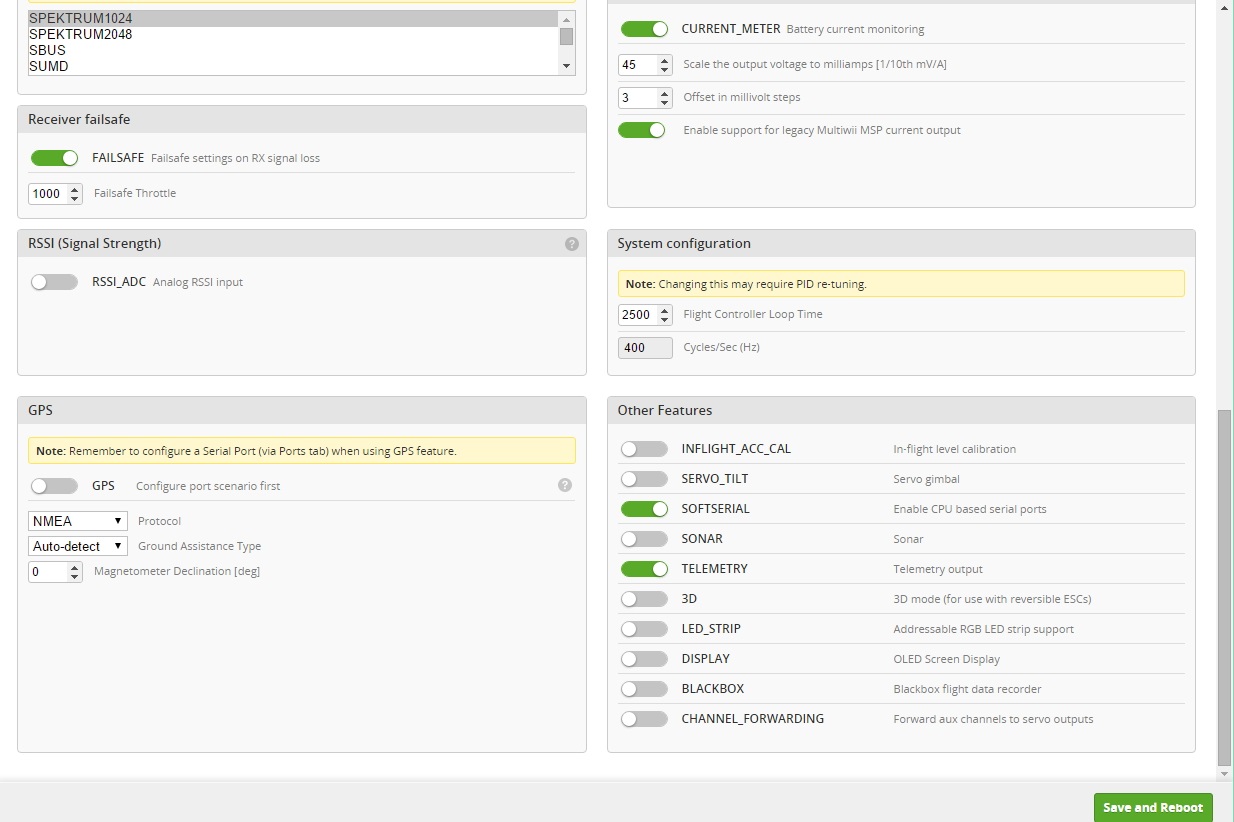
set telemetry_inversion = 1 (required if you want Frsky telemetry)
set frsky_vfas_precision = 1
set deadband=6
set yaw_deadband = 6
set emf_avoidance = 1 (increases processor speed)
set acc_hardware=1 (disables your Accelerometer sensor use if you fly Acro only it disables horizon/angle modes)
set auto_disarm_delay = 10
set pid_controller = 1
set gyro_cut_hz=75
set pterm_cut_hz=45
set dterm_cut_hz=14
Don’t forget to SAVE or your changes will be lost!!!!



CLI Dump
Entering CLI Mode, type ‘exit’ to return, or ‘help’
# dump
# version
# Cleanflight/NAZE 1.10.0 Oct 2 2015 / 14:57:31 (9f95334)
# dump master
# mixer
mixer QUADX
mmix reset
smix reset
# feature
feature -RX_PPM
feature -VBAT
feature -INFLIGHT_ACC_CAL
feature -RX_SERIAL
feature -MOTOR_STOP
feature -SERVO_TILT
feature -SOFTSERIAL
feature -GPS
feature -FAILSAFE
feature -SONAR
feature -TELEMETRY
feature -CURRENT_METER
feature -3D
feature -RX_PARALLEL_PWM
feature -RX_MSP
feature -RSSI_ADC
feature -LED_STRIP
feature -DISPLAY
feature -ONESHOT125
feature -BLACKBOX
feature -CHANNEL_FORWARDING
feature RX_PPM
feature VBAT
feature MOTOR_STOP
feature SOFTSERIAL
feature FAILSAFE
feature TELEMETRY
feature CURRENT_METER
feature ONESHOT125
# map
map AETR1234
# serial
serial 0 1 115200 57600 0 115200
serial 1 0 115200 57600 0 115200
serial 30 4 115200 57600 0 115200
serial 31 0 115200 57600 0 115200
# led
led 0 15,15:ES:IA:0
led 1 15,8:E:WF:0
led 2 15,7:E:WF:0
led 3 15,0:NE:IA:0
led 4 8,0:N:F:0
led 5 7,0:N:F:0
led 6 0,0:NW:IA:0
led 7 0,7:W:WF:0
led 8 0,8:W:WF:0
led 9 0,15:SW:IA:0
led 10 7,15:S:WF:0
led 11 8,15:S:WF:0
led 12 7,7:U:WF:0
led 13 8,7:U:WF:0
led 14 7,8:D:WF:0
led 15 8,8:D:WF:0
led 16 8,9::R:3
led 17 9,10::R:3
led 18 10,11::R:3
led 19 10,12::R:3
led 20 9,13::R:3
led 21 8,14::R:3
led 22 7,14::R:3
led 23 6,13::R:3
led 24 5,12::R:3
led 25 5,11::R:3
led 26 6,10::R:3
led 27 7,9::R:3
led 28 0,0:::0
led 29 0,0:::0
led 30 0,0:::0
led 31 0,0:::0
# color
color 0 0,0,0
color 1 0,255,255
color 2 0,0,255
color 3 30,0,255
color 4 60,0,255
color 5 90,0,255
color 6 120,0,255
color 7 150,0,255
color 8 180,0,255
color 9 210,0,255
color 10 240,0,255
color 11 270,0,255
color 12 300,0,255
color 13 330,0,255
color 14 0,0,0
color 15 0,0,0
set looptime = 2500
set emf_avoidance = 0
set mid_rc = 1500
set min_check = 1100
set max_check = 1900
set rssi_channel = 6
set rssi_scale = 30
set rssi_ppm_invert = 0
set rc_smoothing = 1
set input_filtering_mode = 0
set min_throttle = 1070
set max_throttle = 1980
set min_command = 1000
set servo_center_pulse = 1500
set 3d_deadband_low = 1406
set 3d_deadband_high = 1514
set 3d_neutral = 1460
set 3d_deadband_throttle = 50
set motor_pwm_rate = 400
set servo_pwm_rate = 50
set retarded_arm = 0
set disarm_kill_switch = 1
set auto_disarm_delay = 10
set small_angle = 25
set fixedwing_althold_dir = 1
set reboot_character = 82
set gps_provider = 0
set gps_sbas_mode = 0
set gps_auto_config = 1
set gps_auto_baud = 0
set serialrx_provider = 0
set spektrum_sat_bind = 0
set telemetry_switch = 0
set telemetry_inversion = 1
set frsky_default_lattitude = 0.000
set frsky_default_longitude = 0.000
set frsky_coordinates_format = 0
set frsky_unit = 0
set frsky_vfas_precision = 1
set hott_alarm_sound_interval = 5
set battery_capacity = 0
set vbat_scale = 110
set vbat_max_cell_voltage = 43
set vbat_min_cell_voltage = 33
set vbat_warning_cell_voltage = 35
set current_meter_scale = 45
set current_meter_offset = 3
set multiwii_current_meter_output = 1
set current_meter_type = 2
set align_gyro = 0
set align_acc = 0
set align_mag = 0
set align_board_roll = 0
set align_board_pitch = 0
set align_board_yaw = 90
set max_angle_inclination = 500
set gyro_lpf = 0
set moron_threshold = 32
set gyro_cmpf_factor = 600
set gyro_cmpfm_factor = 250
set yaw_control_direction = 1
set pid_at_min_throttle = 1
set yaw_motor_direction = 1
set yaw_jump_prevention_limit = 300
set tri_unarmed_servo = 1
set servo_lowpass_freq = 400
set servo_lowpass_enable = 0
set failsafe_delay = 10
set failsafe_off_delay = 200
set failsafe_throttle = 1000
set failsafe_kill_switch = 0
set failsafe_throttle_low_delay = 100
set rx_min_usec = 885
set rx_max_usec = 2115
set acc_hardware = 0
set baro_hardware = 0
set mag_hardware = 0
set blackbox_rate_num = 1
set blackbox_rate_denom = 1
set blackbox_device = 0
set magzero_x = 0
set magzero_y = 0
set magzero_z = 0
# rxfail
rxfail 0 a
rxfail 1 a
rxfail 2 a
rxfail 3 a
rxfail 4 h
rxfail 5 h
rxfail 6 h
rxfail 7 h
rxfail 8 h
rxfail 9 h
rxfail 10 h
rxfail 11 h
rxfail 12 h
rxfail 13 h
rxfail 14 h
rxfail 15 h
rxfail 16 h
rxfail 17 h
# dump profile
# profile
profile 0
# aux
aux 0 2 0 1300 1700
aux 1 12 0 1750 2100
aux 2 0 0 900 900
aux 3 0 0 900 900
aux 4 0 0 900 900
aux 5 0 0 900 900
aux 6 0 0 900 900
aux 7 0 0 900 900
aux 8 0 0 900 900
aux 9 0 0 900 900
aux 10 0 0 900 900
aux 11 0 0 900 900
aux 12 0 0 900 900
aux 13 0 0 900 900
aux 14 0 0 900 900
aux 15 0 0 900 900
aux 16 0 0 900 900
aux 17 0 0 900 900
aux 18 0 0 900 900
aux 19 0 0 900 900
# adjrange
adjrange 0 0 0 900 900 0 0
adjrange 1 0 0 900 900 0 0
adjrange 2 0 0 900 900 0 0
adjrange 3 0 0 900 900 0 0
adjrange 4 0 0 900 900 0 0
adjrange 5 0 0 900 900 0 0
adjrange 6 0 0 900 900 0 0
adjrange 7 0 0 900 900 0 0
adjrange 8 0 0 900 900 0 0
adjrange 9 0 0 900 900 0 0
adjrange 10 0 0 900 900 0 0
adjrange 11 0 0 900 900 0 0
# rxrange
rxrange 0 1000 2000
rxrange 1 1000 2000
rxrange 2 1000 2000
rxrange 3 1000 2000
# servo
servo 0 1000 2000 1500 90 90 100 -1
servo 1 1000 2000 1500 90 90 100 -1
servo 2 1000 2000 1500 90 90 100 -1
servo 3 1000 2000 1500 90 90 100 -1
servo 4 1000 2000 1500 90 90 100 -1
servo 5 1000 2000 1500 90 90 100 -1
servo 6 1000 2000 1500 90 90 100 -1
servo 7 1000 2000 1500 90 90 100 -1
set gps_pos_p = 15
set gps_pos_i = 0
set gps_pos_d = 0
set gps_posr_p = 34
set gps_posr_i = 14
set gps_posr_d = 53
set gps_nav_p = 25
set gps_nav_i = 33
set gps_nav_d = 83
set gps_wp_radius = 200
set nav_controls_heading = 1
set nav_speed_min = 100
set nav_speed_max = 300
set nav_slew_rate = 30
set alt_hold_deadband = 40
set alt_hold_fast_change = 1
set deadband = 3
set yaw_deadband = 3
set throttle_correction_value = 0
set throttle_correction_angle = 800
set default_rate_profile = 0
set gimbal_mode = 0
set acc_lpf_factor = 4
set accxy_deadband = 40
set accz_deadband = 40
set accz_lpf_cutoff = 5.000
set acc_unarmedcal = 1
set acc_trim_pitch = 0
set acc_trim_roll = 0
set baro_tab_size = 21
set baro_noise_lpf = 0.600
set baro_cf_vel = 0.985
set baro_cf_alt = 0.965
set mag_declination = 0
set pid_controller = 1
set p_pitch = 40
set i_pitch = 30
set d_pitch = 23
set p_roll = 40
set i_roll = 30
set d_roll = 23
set p_yaw = 85
set i_yaw = 45
set d_yaw = 0
set p_pitchf = 1.500
set i_pitchf = 0.400
set d_pitchf = 0.030
set p_rollf = 1.500
set i_rollf = 0.400
set d_rollf = 0.030
set p_yawf = 2.500
set i_yawf = 1.000
set d_yawf = 0.000
set level_horizon = 3.000
set level_angle = 5.000
set sensitivity_horizon = 75
set p_alt = 50
set i_alt = 0
set d_alt = 0
set p_level = 90
set i_level = 10
set d_level = 100
set p_vel = 120
set i_vel = 45
set d_vel = 1
set yaw_p_limit = 500
set dterm_cut_hz = 15
set pterm_cut_hz = 40
set gyro_cut_hz = 60
# dump rates
# rateprofile
rateprofile 0
set rc_rate = 100
set rc_expo = 65
set rc_yaw_expo = 35
set thr_mid = 50
set thr_expo = 0
set roll_rate = 30
set pitch_rate = 30
set yaw_rate = 50
set tpa_rate = 0
set tpa_breakpoint = 1500
That’s all my personal preference, change it according to your liking.
For a more detail CLI command list, check here.
Calibrate ESC
As these are flashed with BLHeli I didn’t calibrate these using cleanflight all calibration was done using the blheli settings.

If your not using BLheli flashed ESC’s
TAKE YOUR PROPELLERS OFF while working with the quadcopter.
You’ve been warned!!!
Open Cleanflight and select the motor testing tab then select the box next to the master slider to allow motor control.
Raise the slider to the top before plugging in your lipo. Plug in your lipo and wait for the calibration tones once you hear these lower the master slider all the way. You should hear the calibration finished tones.
Check if the calibration is successfully by checking if each motor spins to the same input. (Remember do not mount your props when doing the testing.)
FrSky Telemetry Setup
1 Connect your FrSky receiver (like the d4r-II) to your Flip32/Naze32. Connect the External analog telemetry Rx port of your FrSky receiver to RC input pin 6 on your Flip32/ Naze32
2 Connect to your board using Configurator and select the configuration tab. Select Softserial & Telemetry then hit SAVE.
3 Select the ports tab on Configurator and then under Softserial1 set Telemetry to Frsky & Auto
4 Select the cli tab on Configurator and type the following commands
set telemetry_inversion = 1
set frsky_vfas_precision = 1
then type save
Select the Settings Tab and plug in your Lipo, if you have done everything correctly your voltage should be displayed. Adjust your voltages on the config page to line up with what your actual voltage is.
RSSI Setup
My RSSI setup can be found here.
MW Osd Setup


That’s it for now will add to this post as I have time and am able to Maiden .